Introduction
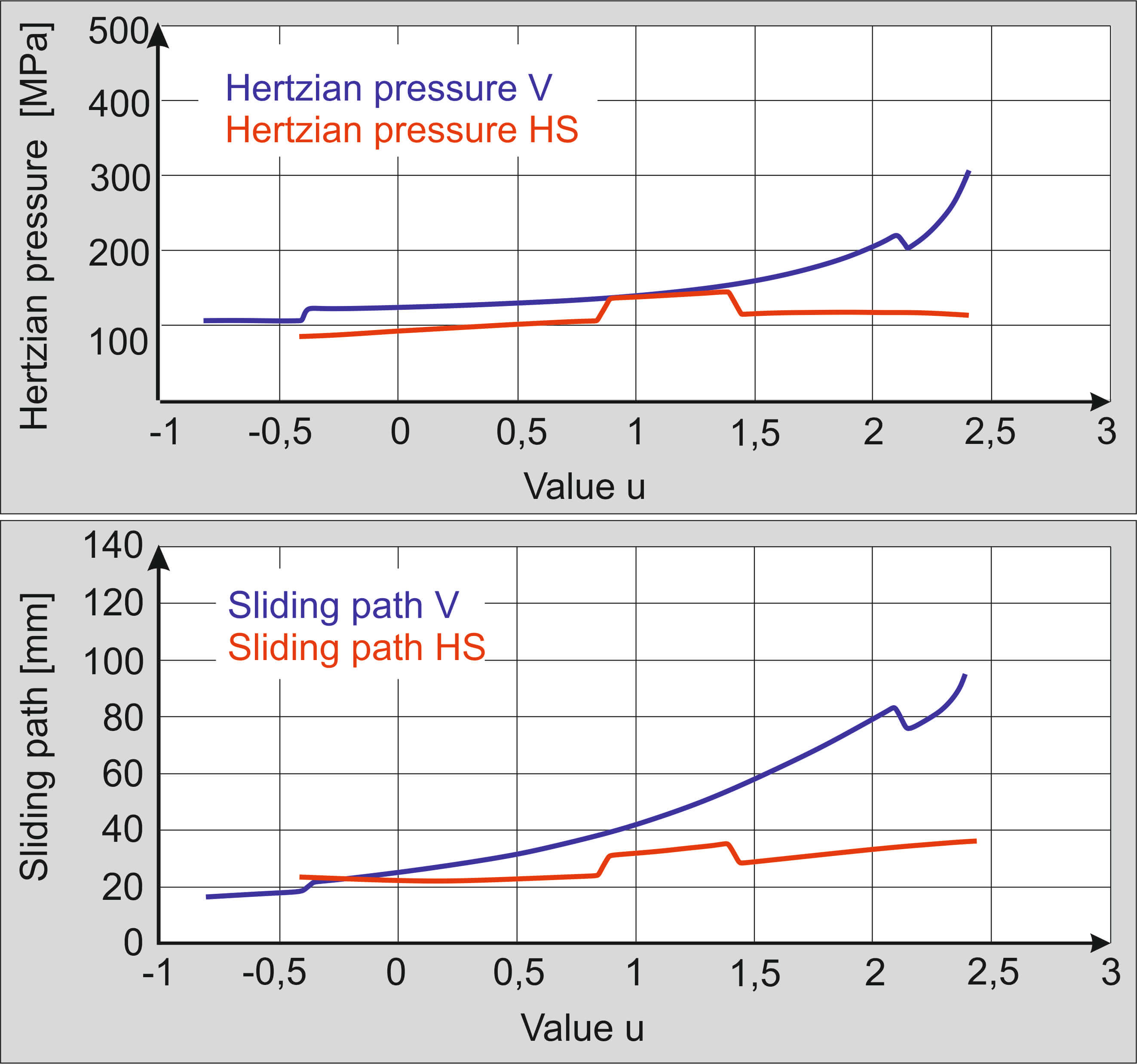
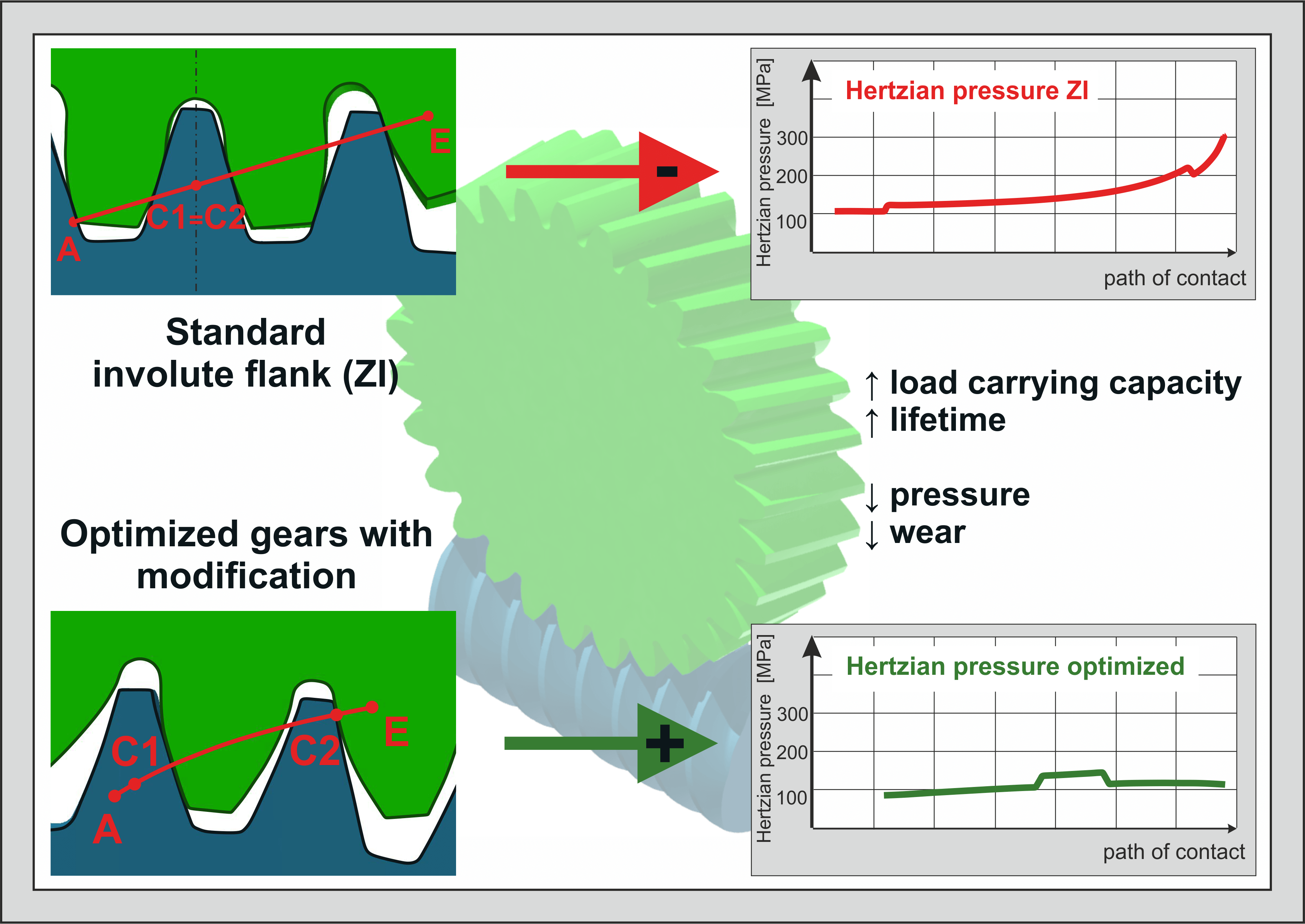
Crossed helical gears paired with steel-worm and plastic-wheel are a commonly used but comparatively under-studied form of gearboxes. Primarily they take part in actuators, power take-offs and position units as well as in the process automation. As high-performance plastics are developed, plastic gears can increasingly replace steel applications. Crossed helical gears with a plastic wheel are lighter, less expensive, and advantageous in terms of vibration and noise damping. Current research shows optimization possibilities for pressures, sliding paths and thus the load capacity and lifetime. The transfer of flank geometries from other types of gears to crossed helical gears leads to a pressure optimization up to 30%.
State of Research
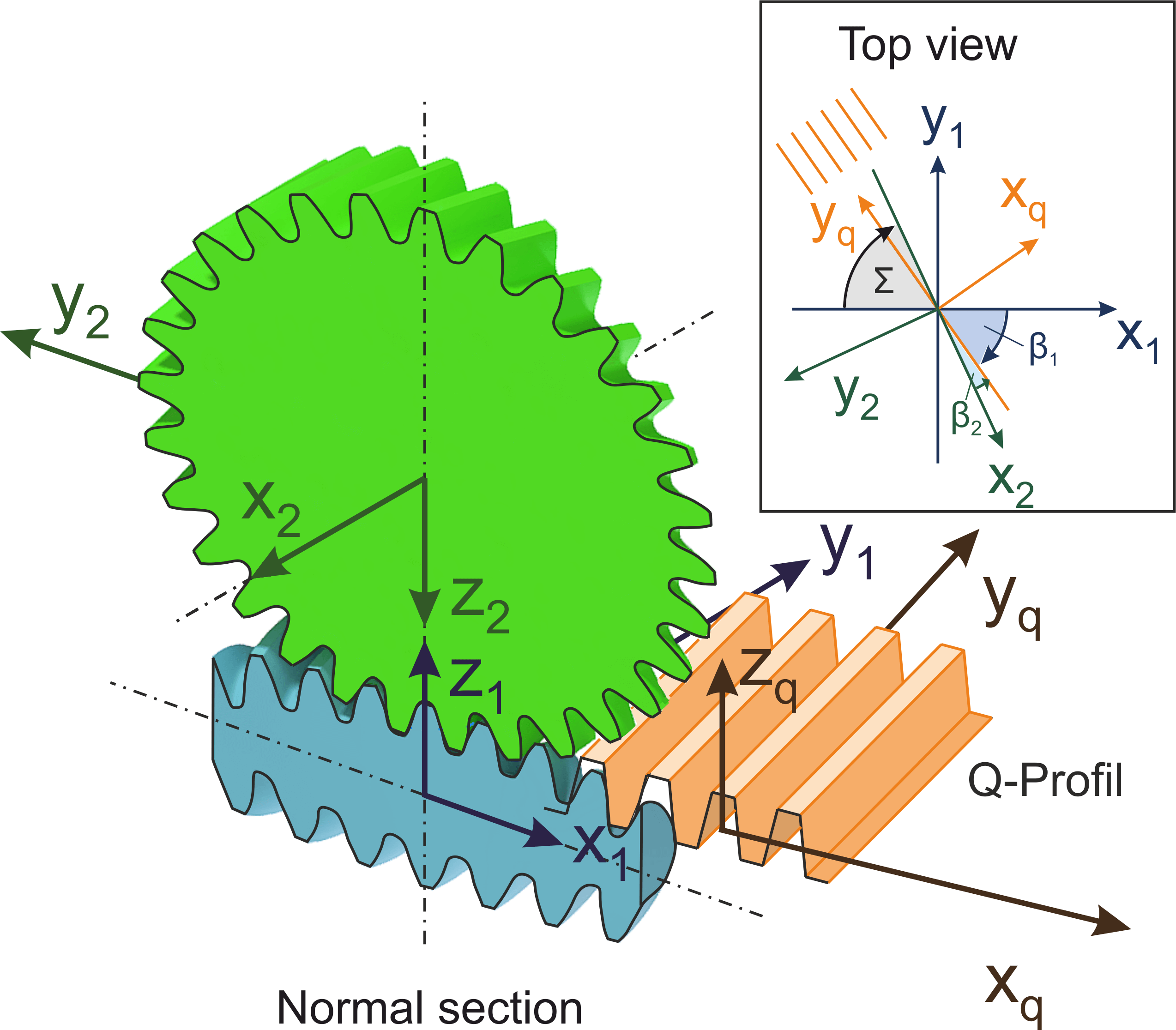
Fundamentals and calculations of crossed helical gears based on the work of Niemann and Winter [1]. They derived the geometry in the transverse section with a thin counterpart rack arranged in space. Two steel gears were considered, for which the calculation of pressures, efficiencies and sliding paths are conducted after the geometry derivation. According to Niemann and Winter, a screw point is a prerequisite for the running ability of a crossed helical gear. The parameters are calculated in the so-called screw point.
Today, industry is mostly using crossed helical gears with steel worm and plastic wheel. The behavior of plastic in gears has been studied in scientific work. VDI Guideline 2736 summarizes important contents and provides an overview of the influences of the plastic material to be considered.
The applications of crossed helical gears require high efficiency in a small space. Compared to other types of gearboxes, there is no maintenance strategy that provides a wheel or lubricant change at a specified time interval. To fit the requirements in the best conceivable way, it is necessary to understand these gears in detail.